智东西5月7日消息,近日,英国剑桥大学的研究人员训练一个厨师机器人不断“咀嚼”并品尝食物,以此来模仿厨师的烹饪过程。
一道美味菜肴的诞生,依赖于厨师在烹饪过程中不断品尝味道、增减调料,在这个过程中,味觉就是人们判断食物味道的重要指标。
让机器人也能“边品尝边烹饪”,这虽然听起来有些荒诞,但该论文的第一作者、剑桥大学工程系的Grzegorz Sochacki说:“我们希望机器人能够理解味道的概念,这将使它们成为更好的厨师。”
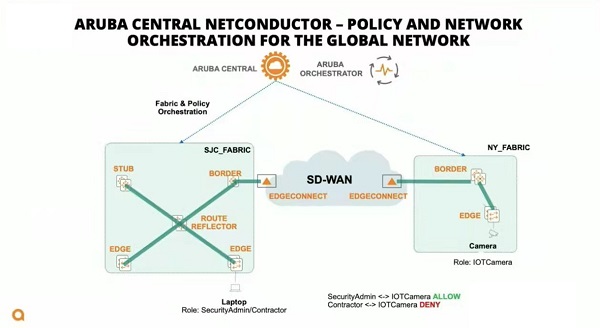
研究人员开发了一个装有基于电导的味觉传感器的UR5机械臂的实验装置,通过混合食物模拟咀嚼、电流传导复现盐的味道,帮助机器人品尝食物的“味道”。
▲研究人员的实验装置
因此,经过训练的机器人“厨师”可以在咀嚼过程的不同阶段品尝食物的盐度,并将所含盐度的信息生成数据发送给计算机,然后生成可视化的味道数据图像。
该论文标题为Mastication-Enhanced Taste-Based Classification of Multi-Ingredient Dishes for Robotic Cooking(《面向机器人烹饪的基于咀嚼增强味道的多成分菜肴分类》)已于5月4日发表在瑞士开放存取出版商Frontiers旗下的机器人学术期刊Frontiers in Robotics & AI(《机器人与人工智能前沿》)上。
链接:https://doi.org/10.3389/frobt.2022.886074
01 边搅拌边品尝,模拟人类烹饪过程
烹饪是机器人自动化领域的难题之一,多个研究人员参与研究了烹饪的不同自动化环节,包括通过视觉反馈控制机器人煎香肠的时间、远程操作机器人装饰蛋糕、用机械臂装载洗碗机等。
也有研究人员使用“电子舌头”来帮助机器人检测肉类等,但这个过程往往需要切碎、分离或与酒精混合等复杂过程,才能使得“电子舌头”发挥作用,而机器人厨师和人类厨师在烹饪过程中最大的区别是人类厨师可以在烹饪中“边尝边做”。
因此,现有的解决方案对于机器人“厨师”来说不够及时。该论文的共同作者、剑桥大学工程系博士Arsen Abdulali说:“目前的电子测试方法只从均质样本中获取一个快照,因此我们希望在机器人系统中复制更真实的咀嚼和品尝过程,这应该会产生更美味的最终产品。”
事实上,人们在咀嚼食物时,会品尝到其味道和质地的变化,例如,在夏天当我们咬一口新鲜番茄,番茄就会释放汁液,再加上人类咀嚼时释放的唾液和消化酶,就会改变我们对番茄味道的感知。
研究人员该论文的第一作者、剑桥工程系的Grzegorz Sochacki说:“大多数家庭厨师都会熟悉边吃边吃的概念——在整个烹饪过程中检查一道菜,以检查口味的平衡是否正确。如果机器人要用于食物准备的某些方面,重要的是他们能够‘品尝’他们正在烹饪的东西。”
剑桥大学的研究人员发现边品尝边烹饪的方式能提高机器人快速准确地评估菜肴咸味的能力。因此,研究人员训练其机器人装置品尝不同的西红柿炒鸡蛋,在咀嚼过程的三个不同阶段品尝九种不同的炒鸡蛋和西红柿,然后产生了不同菜肴的味道数据图像。
▲实验过程
他们的研究结果可能有助于开发自动化或半自动化的食物制备,它可以帮助机器人学习什么味道好,什么味道不好。
029份菜各品尝3次 生成可视化味道图像
再现人类的咀嚼过程还可以提取更多咀嚼过程中的信息。研究人员称,在食品机械加工的几种状态下品尝可以显著提高具有不同数量相同成分的食品的分类性能。
为了证明上述结论,研究人员模拟人类的品尝过程建模,测量“咀嚼”过程中食物在不同阶段的味道并生成数据。咀嚼是粉碎和研磨食物的过程,其主要目的是减小食物颗粒的平均尺寸,同时,较小的颗粒也能为消化酶提供更大的表面积来发挥作用。因此,咀嚼在品尝过程中起着非常重要的作用,研究人员设置混合器来模拟该过程。
在味道的测量上,机器人通过电导传感器重现盐的味道,盐度会随着离子浓度、离子迁移率和离子电荷的增加而增加。
考虑到人体舌头表面有多个感知的受体,研究人员会在实验中多个点品尝并将味道表示为一系列测量值,为了模仿机器人厨师咀嚼和品尝的人类过程,研究人员将一个类似于盐度传感器的探针连接到机器人手臂上,传感器就可以移动到多个位置上,该样本的位置和数据最终生成包含味道数据的图像。
▲9道菜混合前后盐度测量值的差异
研究人员准备了9种盐度和西红柿含量不等的西红柿炒鸡蛋,随后机器人使用探针来“品尝”菜肴,并在几秒钟内返回读数。
该读数也就作为味道的数据信息来生成图像。该图像基于2个参数,分别是测试点的数量和盘子大小,测试点呈正方形网格分布。
▲不同混合阶段中不同添加剂菜品的电导测量直方图。
实验过程中,混合过程是无法控制每道菜都完全相同的,因此,研究人员在实验过程中会让机器人对每道菜品尝3次,但研究人员只使用第一次和最后一次品尝进行分类,以提高实验的可重复性。
第一次品尝是在未混合的食物上进行的,然后,机器人将样品混合几秒钟并再次品尝,此测量仅用于可视化。最后机器人在最大RPM下再混合60秒后,再次品尝这道菜,咀嚼不同时刻产生不同读数进一步丰富味觉图的数据信息。
03未混合食材盐度差距明显 但无法分辨同质化样本
从实验生成的味觉图中可以看出,未混合的样品会显示出非常明显的电导率降低区域,也就是没有盐的地方,这些区域会和鸡蛋之间存在非常清晰的边界。最后一个样本的数据电导分布则相对均匀,其电导值介于番茄和鸡蛋的电导之间。
▲同一道西红柿炒鸡蛋在三个不同混合阶段后的味道映射
研究人员称,咀嚼的每个阶段都会产生明显不同的味道数据,这也为实验提供了额外的信息。
根据这项研究,与其他电子品尝方法相比,机器人评估咸味的能力有了显著提高,这些方法通常很耗时,而且只能提供一次读数。
研究人员表示,通过模仿人类咀嚼和品尝的过程,机器人最终将能够生产人类喜欢的食物,并且可以根据个人口味进行调整。
Abdulali说:“在我们的实验中,机器人可以‘看到’食物被咀嚼时的差异,从而提高了它的味觉能力。”
与该项目合作的家用电器制造商Beko的高级科学家Muhammad Chughtai说:“我们相信机器人厨师的发展将在未来繁忙的家庭和辅助生活家庭中发挥重要作用。这个结果是机器人烹饪的一次飞跃,通过使用机器和深度学习算法,咀嚼将帮助机器人厨师根据不同的菜肴和用户调整口味。”
即使一些实验结果看起来很直观,但在一些同质化样本下,该装置的表现较差。事实上,混合不同量的盐和西红柿最终会产生相同的平均盐度,由于传感器的特定结构,它并不能区分具有相同化学成分的2道菜。
此外,菜品的温度、菜品是固态或液态等都会影响机器人在烹饪中的品尝过程。
04结语:机器人自动化烹饪 需对照人类味觉
此前,机器人的应用通常集中于流程化、固定化的工序任务中,“品尝”这一任务往往充满了极大的不确定性,不同人们因自身特点不同,也会对食物味道产生不同的感受,足以证明机器人自动化在烹饪领域的难度。
再加上人类在品尝过程中会受唾液中化学成分的影响以及食物温度、个人喜好等,因此研究人员称,未来的工作将对唾液的研究,可能会为机器人增加人类唾液中存在的脂肪酶和淀粉酶的化学试剂。
机器人自动化在烹饪领域的研究还存在不足,但将味道等信息变成可视化的数据能够推动研究进一步深入。研究人员称,他们将依照此次分类数据建立一个规范,作为比较机器人味觉与人类味觉心理物理学研究的基准,并继续扩展这一概念在未来的延伸。
来源:Frontiers in Robotics & AI、彭博社
本文来自微信公众号 “智东西”(ID:zhidxcom),作者:程 茜,36氪经授权发布。